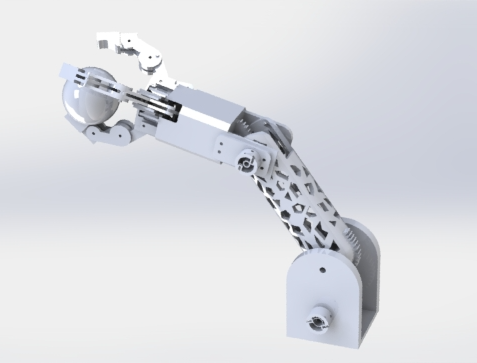
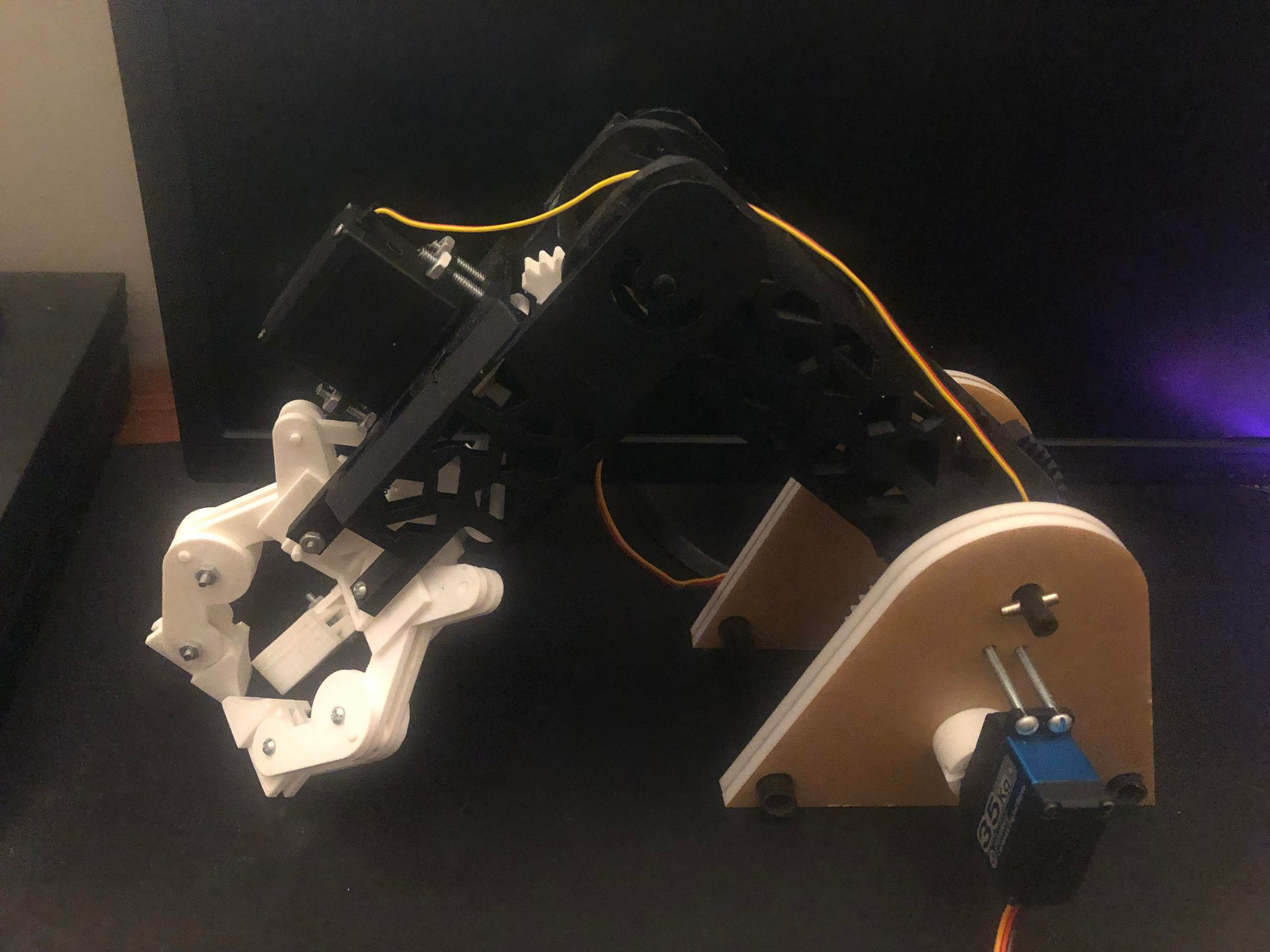
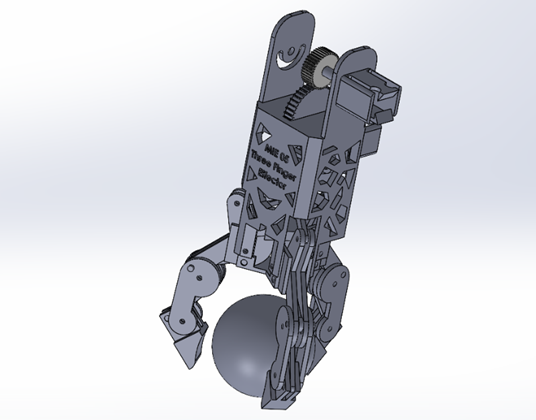
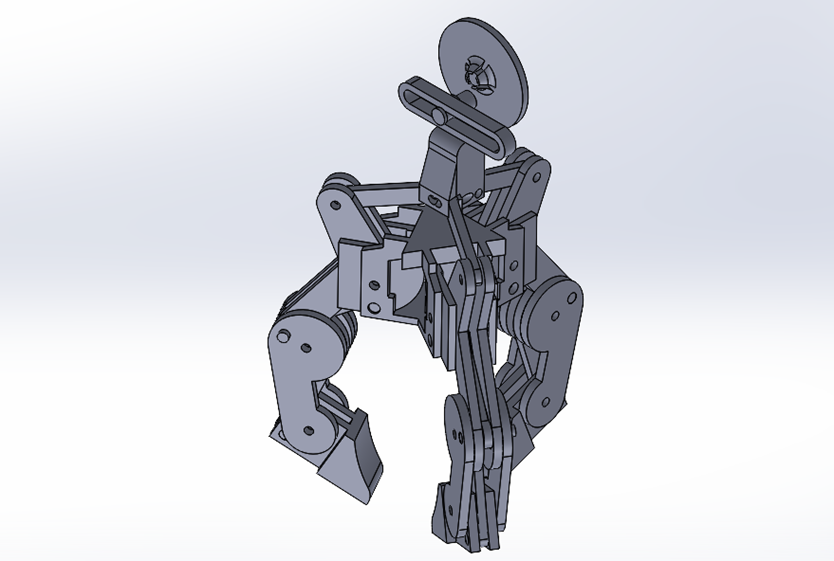
Multi-Finger Effector
Worked alongside a team of five to conceptualize and construct a robotic hand, complete with shoulder and wrist joints. The objective of the project was to enable the robotic hand to lift and position a 1-pound object as per user input. Furthermore, the robotic arm controls were written in C++ and executed using Raspberry Pi. As for all the simulations, they were done using Ansys mechanical and rigid body dynamics.